

Ein 3D Drucker braucht zum Drucken 3D Daten. Ein Weg diese zu erzeugen ist ein ein 3D CAD Programm, ein anderer Weg ist das 3D scannen von bereits existierenden Objekten. Um nun ein Objekt zu scannen, also seine Geometrie zu erfassen, gibt es mehrere Möglichkeiten. Laser-Triangulation, strukturiertes Licht und Stereoskopie und andere, um hier nur ein paar zu nennen.
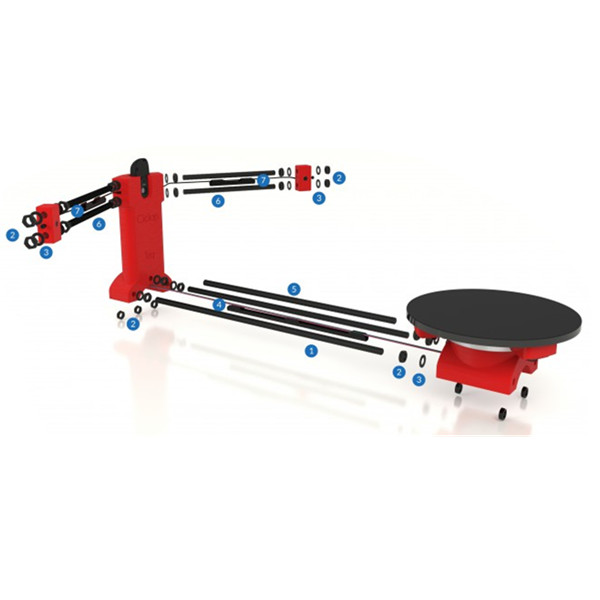
Der 3D Scanner "Ciclop" von BQ nutzt Laser-Triangulation, hierbei wird das zu erfassende Objekt auf einen Drehteller gestellt und von zwei Seiten mit einem vertikalen Laserstahl zeilenweise mit einer Kamera erfasst. Das Objekt wird nun ein wenig gedreht und erneut gescannt. Das Programm Horus erstellt nun, Zeile für Zeile eine Abbildung der Oberfläche als "Pixelwolke" die als *.PLY abgespeichert wird und in einem nachfolgenden Schritt nachbearbeitet werden muß. Meshlab oder auch Cloud Compare sind gängige Freeware/Open Source Lösungen zum zusammenfügen mehrerer aus Horus entstandener "Pixelwolken" eines Objektes und verbinden diese zu zu einer einzigen "Pixelwolke" um daraus ein Netzmodell, eine *.STL Datei, zu erzeugen, die dann in den G-Code für den 3D Drucker umgewandelt wird.
Klingt ja alles erstmal irre kompliziert, wozu dann der 3D Scanner "Ciclop"?
Auch hier habe ich nach einem günstigen Einstieg in diese Technologie gesucht, 3D Scanner die "fertige" *.STL Dateien erzeugen sind natürlich auch zu bekommen, aber dann auch gleich ein vielfaches teurer, und zum anderen scheint mir die Möglichkeit die Scan-files nachbearbeiten zu können auch Vorteile zu haben. Von daher bietet mir sich mit dem 3D Scanner "Ciclop" die Möglichkeit beides zu einem sehr günstigen Preis auszuprobieren.
Letztlich gab dann das Angebot, das ich auf der Seite www.banggood.com gefunden habe, den Ausschlag einen Bausatz zu bestellen.
Auf der BQ Seite sind auch alle Anleitungen und Treiber im download verfügbar, diese werden auch mitgleliefert, aber um sich schon im Vorfeld ein Bild zu machen ganz praktisch. Auch die Handbücher zur Bildbearbeitungs SW Horus sind dort in deutscher Sprache verfügbar.
Dieser Scanner ist ein open source Projekt, Somit kann man sich die Teile auch selber zusammenstellen und die die benötigten Kunststoffteile selber ausdrucken sie sind bei thingiverse unter "thing:740357" verfügbar.
Wer noch tiefer in diese Materie eintauchen will, wird hier diwo fündig.
Aber er ist auch als kompletter Bausatz aus Deutschland über Amazon oder e-bay zu bekommen, nur eben entsprechend teuer.
Die Daten sind schon mal viel versprechend:
Einiges läßt sich allerdings nicht, oder nur unzureichend scannen:
Erstaunlicherweise kam er bereits ein paar Tage später per Post bei mir an, ohne Zoll und ähnlichem Tamtam. Schon erstaunlich das man ein 4kg schweres Paket mit einem Warenwert um 100,-€ ohne Porto und Versandkosten in ein paar Tagen von China nach Deutschland schaffen kann.
Also mal aufmachen und die Teile ansehen. Eigentlich recht überschaubar:
Begonnen wird mit der Montage der Kamerasäule. An der Oberseite wird die Kamera eingesteckt, an der Rückseite die Steuerplatine angeschraubt, die Abdeckung lassen wir hier aber ersteinmal weg.

Als nächstes wird der Drehteller montiert. Motor in die Basis einschrauben, Kugellager aufstecken und festschrauben, Drehteller montieren und die Antirutschfolie aufkleben. Das geht problemlos.
Damit das Ganze schon mal stabil steht habe ich nun mit den Geindestangen die Kamerasäule mit dem Drehteller verbunden. Es wird zwar nirgends darauf hingewiesen, aber ich habe dabei versucht beide Teile parallel zueinander auszurichten, so das die Kamera den Drehteller genau im Zentrum des Betrachtungswinkels hat.

Nun folgen die beiden seitlichen Arme für die Zeilenlaser, sie werden mit Hilfe weiterer Gewindestangen an der Kamerasäule montiert. Auch hier habe ich darauf geachtet das die Abständer des linken und rechten Armes gleich sind und die Teile zueinander ausgerichtet sind.

Die beiden Zeilenlaser werden nu eingesteckt und mit der Schraube leicht befestigt, sie werden später noch ausgerichtet. Auch die Kabel werden sauber an der Armen zur Kamerasäule hin verlegt.

Zuletzt werden die Kabel mit der Steuerplatine verbunden, diese sind beschriftet, so das es schnell und fehlerfrei funktioniert.

Fertig, der Aufbau hat nun gut 2 Stunden gedauert, war aber problemlos.
Die Güte der späteren Scans sind einzig und allein davon anhänig wie gut der Scanner eingerichtet ist. Alle nachfolgenden Schritte erfordern daher viel Sorgfalt, kompliziert ist es nicht, aber schon ein lecht schräg stehender Zeilenlaser sorgt dafür das das Bild versetzt ist und der Scan später "verzogen" ist.
Die für den 3D Scanner benötigte Software war auf dem Speicherstick enthalten und ließ sich gemäß der ebenfalls mitgelieferten Anleitung sehr einfach installieren. Im Anschluß daran wurde der 3D Scanner zum ersten mal mit dem PC verbunden und ließ sich damit auch ansteuern.
Nun werden gemäß der Menuführung nacheinander die Zeilenlaser ausgerichtet. Hier habe ich darauf geachtet das sie sich im Drehpunkt des Tellers treffen, darauf wird in der Anleitung nicht hingewiesen, aber es erscheint mir sinnvoll dies zu tun.
Mit Hilfe der beiliegenden Testschablone wird nun die Kamera scharf gestellt und kalibriert. Dies dauert alles etwas ist aber nicht weiter schwierig.
Als letztes werden noch die Parameter für das scannen festgelegt, ich habe mich für 1/8 Schritte, also der höchsten Auflösung entschieden, für den Anfang ist das eigentlich nicht sinnvoll, denn so dauert jeder Scan rund 8 Minuten. Wenn man es eilig hat sollte man es bei den Vollschritten belassen.
Nun wird es Ernst, der erste Scan.
Wie nun aus der Pixelwolke *.PLY eine *.STL Datei entsteht und daraus der G-Code für den 3D Drucker wird.
Hierfür gibt es eine Menge Möglichkeiten, man muß sich nur für eine entscheiden. Meine Wahl fiel auf ein weiteres open source Projekt meshlab das ebenfalls als free.download erhältlich ist .
Blauer Hintergrund, blau kann der Scanner nicht mit dem roten Laser erkennen. Hier habe ich mir einen blauen Farbkarton im Schreibwaren Geschäft besorgt, einen 30cm hohen Streifen abgeschnitten und diesen halbrund gebogen. So entstehen keinen Ecken die ggf wieder irgendwelche optichen Effekte erzeugen. Aus dem Rest des Farbkartons habe ich einen Boden und einen Deckel gebaut. Verklebt wurde das Ganze mit Heißkleber.
Den Trick mit der blauen Farbe nutze ich auch für den Drehteller, der in blau seidenmatt umgespritzt wird. So bleibt auch dieses Bauteil beim scannen für den Cyclop unsichtbar und erzeugt kein zusätzlichen Daten.
Um nun einige Teile die von allein nicht gerne stehen bleiben auf dem Drehteller zu fixieren bietet sich blaue Knete an, diese wird wie alles andere "blaue" beim Scan nicht erkannt.
Um nun noch zu verhindern das von hinten flackerndes Licht vom Bildschirm, Leuchtstoffröhre, Sonne o.ä. eindringt und den Scan beeinflußt habe ich den Cyclope auf ein Brett mit Rückwand montiert. Eine umlaufende Leiste dienst hierbei als Lichtfalle zum abnehmbaren Hintergund. So entsteht eine komplett lichtdichte Einhausung.
Nun ist es darin ohne die Laser dunkel wie im Bärenarsch, auch Mist wenn man einen farbigen Scann erstellen will. Hierfür habe ich je einen LED Streifen an den Armen zu den Linienlasern befestigt. Diese kann ich nun bei Bedarf von außen einschalten und erhalte für die Farbscans immer gleiche Lichtverhältnisse. Was sich im ersten Moment wie eine Spielerei anhört hat also durchaus seinen Hintergrund, denn unstabile Lichtverhältnisse würden jeden Scan verderben. Für die reine Erfassung der äußeren Geometrie benötigt man das Licht der LED Streifen nicht, das funktioniert auch ohne die LED Streifen sehr gut.
Rund um das Thema "3D Scanner Cyclop" gibt es bereits einiges im www zu finden: